Week 3 Discussion Notes
Table of Contents
Planes
When specifying a line, we just need two pieces of information: a point on the line and the direction that the line points in. Then any point on the line can be represented by .
Similar to a line, to specify a plane, we still need a point on the plane. However, a plane doesn't really have a direction, but it does have a tilt. If you think about it, a normal vector to the plane is a succinct way of describing tilt. Then given any point on the line, the vector is parallel to the plane, so we get
Graphically,
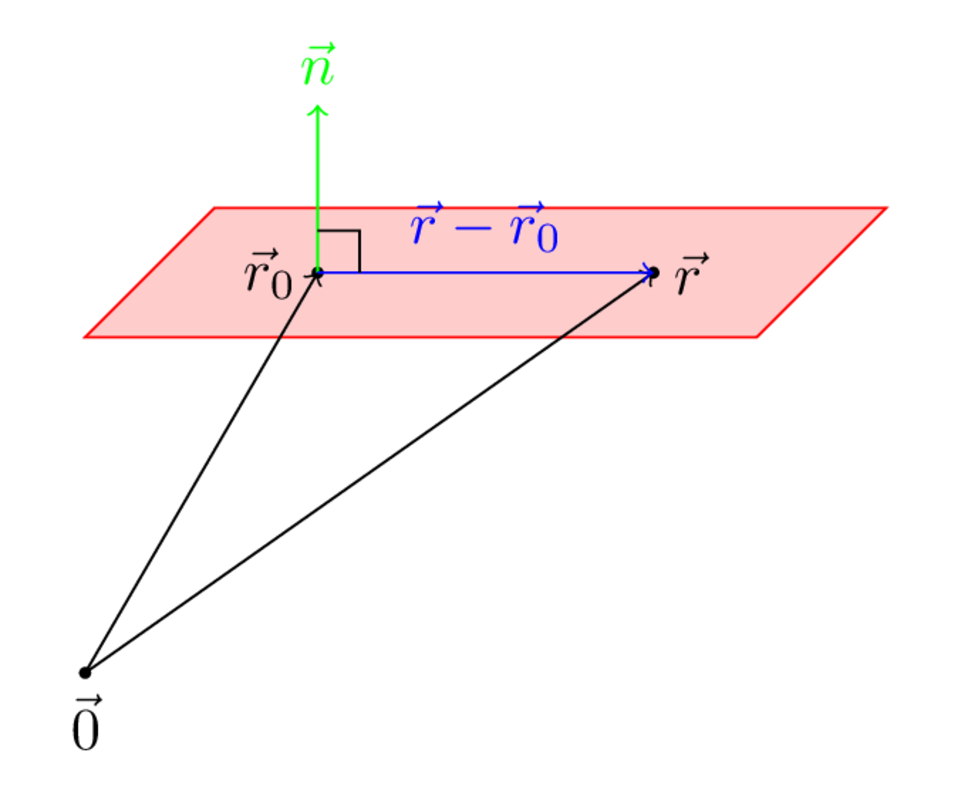
If we let , , and , then the equation becomes
Note that the coefficients of our normal vector are the coefficients on . This means that given the equation of a plane, you can immediately write down a normal vector just by looking at the coefficients.
Scalar Triple Product
The scalar triple product is the (signed) volume of the parallelepiped spanned by . This means that if the scalar triple product is , then the parallelepiped is flat, i.e., must be coplanar.
Collision vs. Intersection
If and are two curves, then:
- They intersect when (note the different variables).
- They collide when (note the variables are the same).
For example:
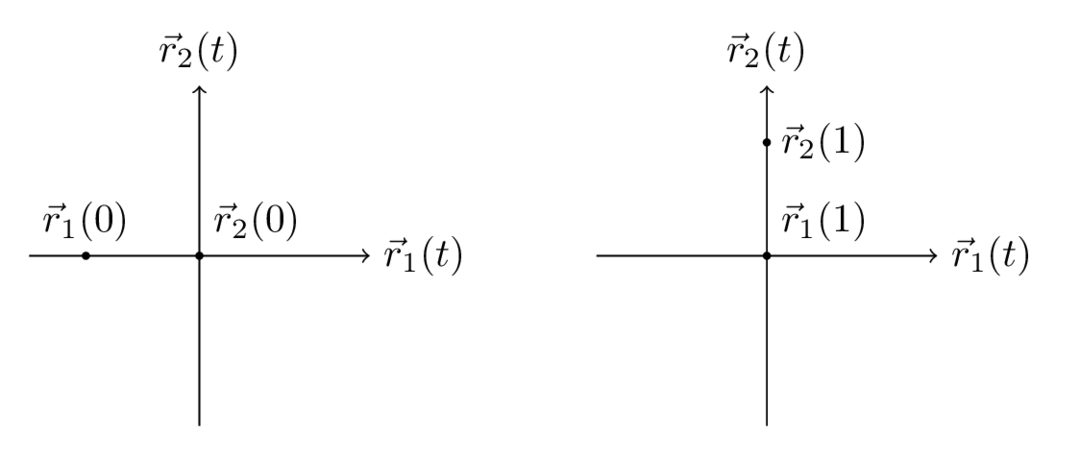
In the picture, and intersect because , but they don't collide because they pass through the intersection at different times.