A function f always comes with a domain D, and the range of f is determined by D. If the domain isn't specified, then it's usually taken to be the largest set where f is defined.
Example 1.
If f(x)=x1 and D is not specified, then we assume D={x∈R∣x=0}.
Example 2.
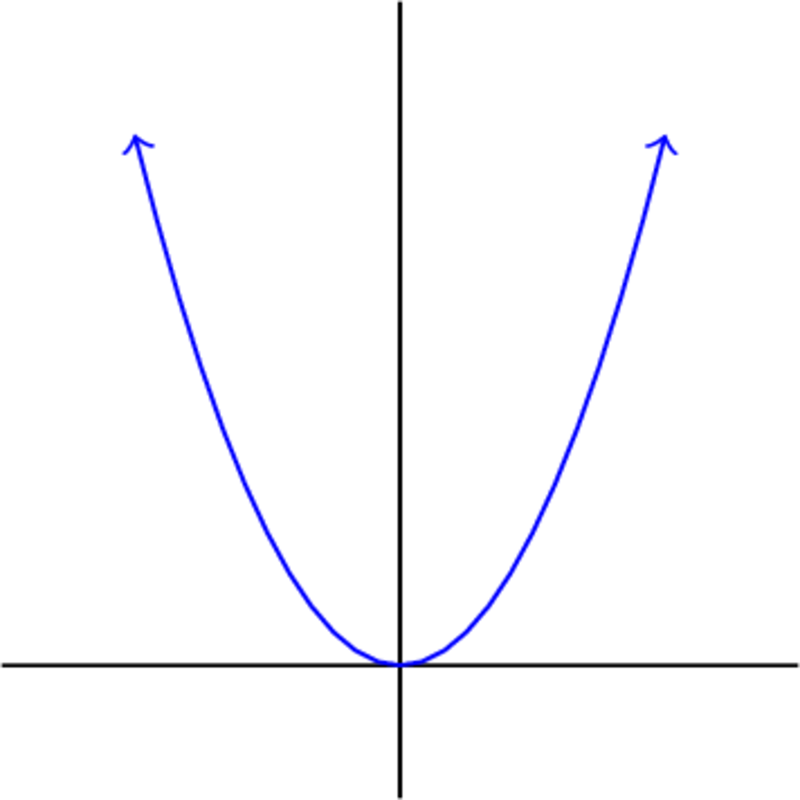
Let f(x)=x2.
D=R⟹R=[0,∞)
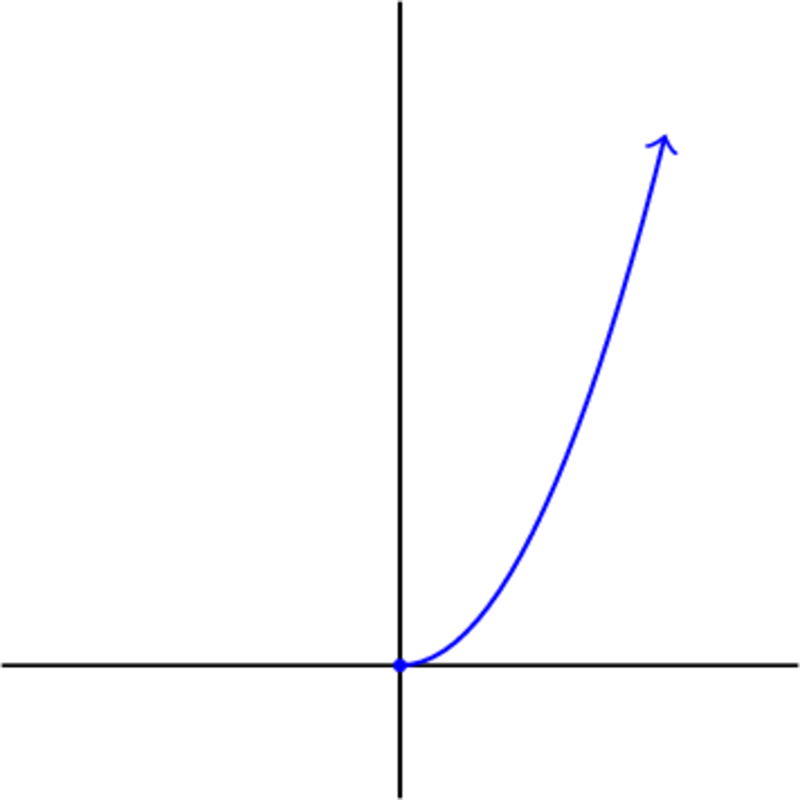
D=[0,∞)⟹R=[0,∞)
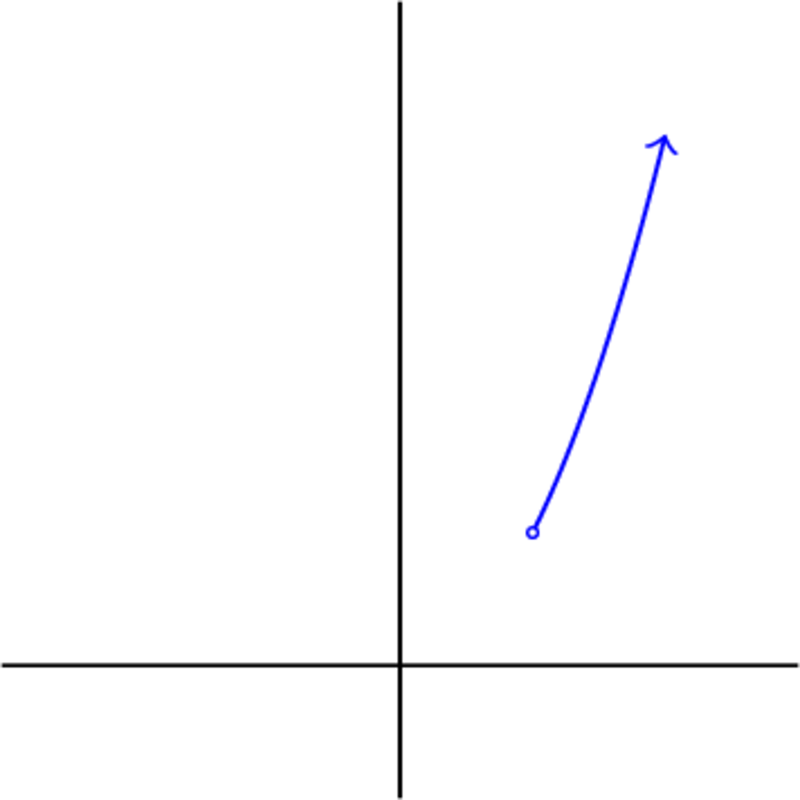
D={x∈R∣x>2}⟹R=(4,∞)
Inverses
What is an Inverse?
Given a function f, we'd like to know if we can go "backwards" from f. This is useful if you need to solve something like f(x)=y; if we can "undo" f, then we automatically have the solution to the equation. This can be done if f is invertible:
Definition
Let f have domain D and range R. If ∃g with domain R and range D such that
f(g(x))=x for all x∈R and
g(f(x))=x for all x∈D,
then we say f is invertible and we call f−1=g the inverse of f.
When is there an Inverse?
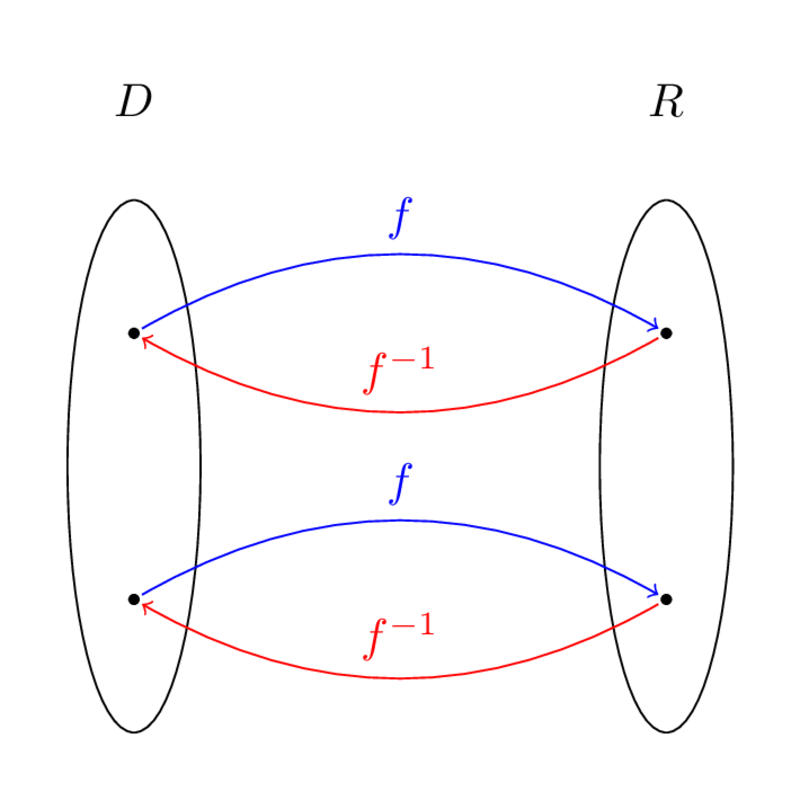
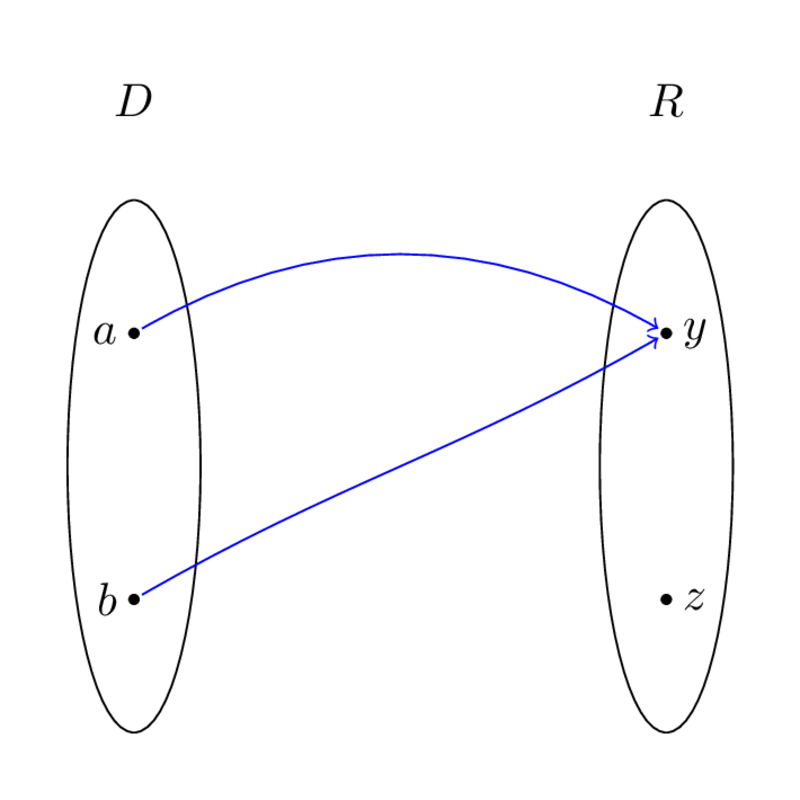
So when does f have an inverse? Let's look at a situation where f does not have one.
f doesn't have an inverse here because we can't go backwards from y to get both a and b. Indeed, any function g with domain R will map y to either a or b, but not both. The problem is that f maps two different elements to the same thing, so if we prevent this, f will have an inverse.
To prevent this, we need f to map two different elements to two different things. More succinctly, a=b⟹f(a)=f(b). If f satisfies this, then we call f one-to-one, but this isn't the only way to tell if f is one-to-one:
Definition (one-to-one)
Let f have domain D, and suppose one of the following is true about f:
a=b⟹f(a)=f(b) for any a,b∈D or
f(x)=y has exactly one solution for every y∈R or
f(a)=f(b)⟹a=b for any a,b∈D or
f passes the horizontal line test.
Then we say f is one-to-one or injective.
Notice that the domain is very important when determining whether f is one-to-one or not.
Example 3.
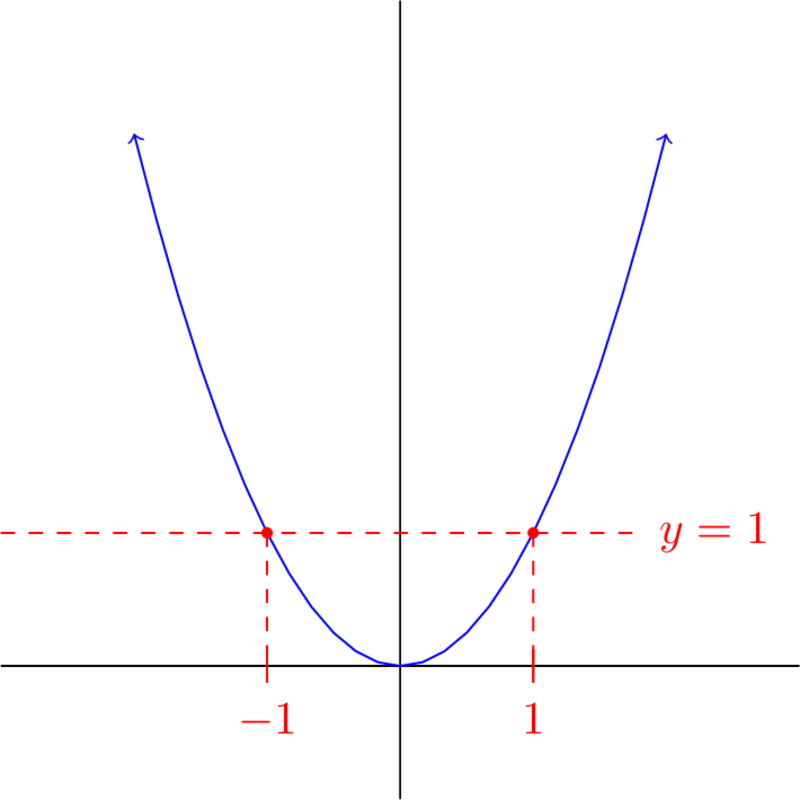
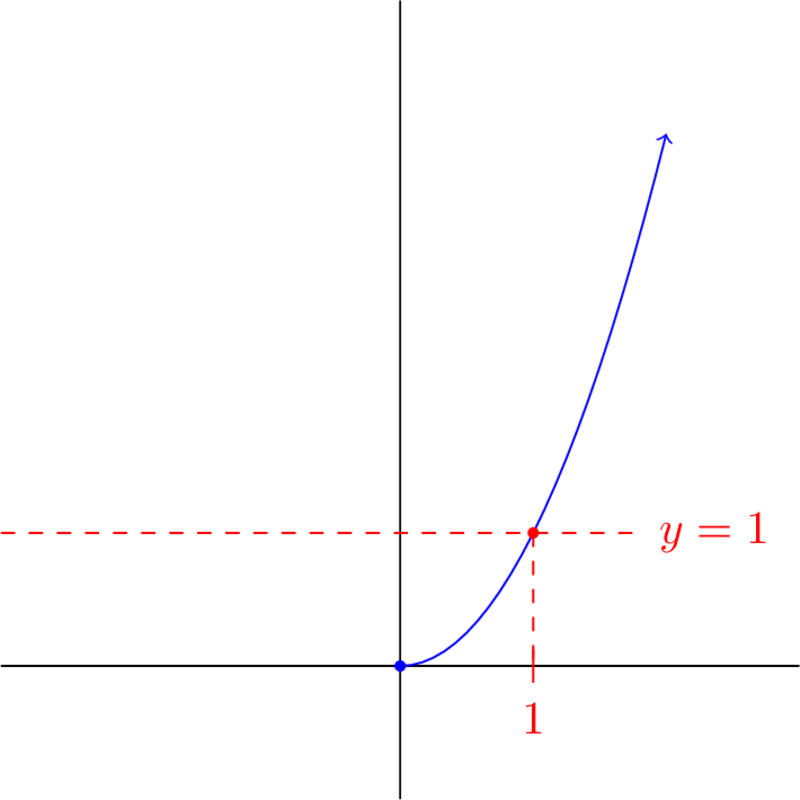
Let f(x)=x2.
If D=R, then fis not one-to-one.
f(x)=1 has two solutions: −1 and 1.
If D=[0,∞), then fis one-to-one.
Since f is one-to-one, it has an inverse, which is f−1(x)=x.
Inverse Trigonometric Functions
Definitions
In order to define inverse trig functions, we need to find domains so that they are one-to-one without changing their ranges. Because trig functions oscillate, there are a lot of intervals like these, so which one do we take? 0 is a nice number, so we are going to look for a domain containing 0 which doesn't change the range of our function.
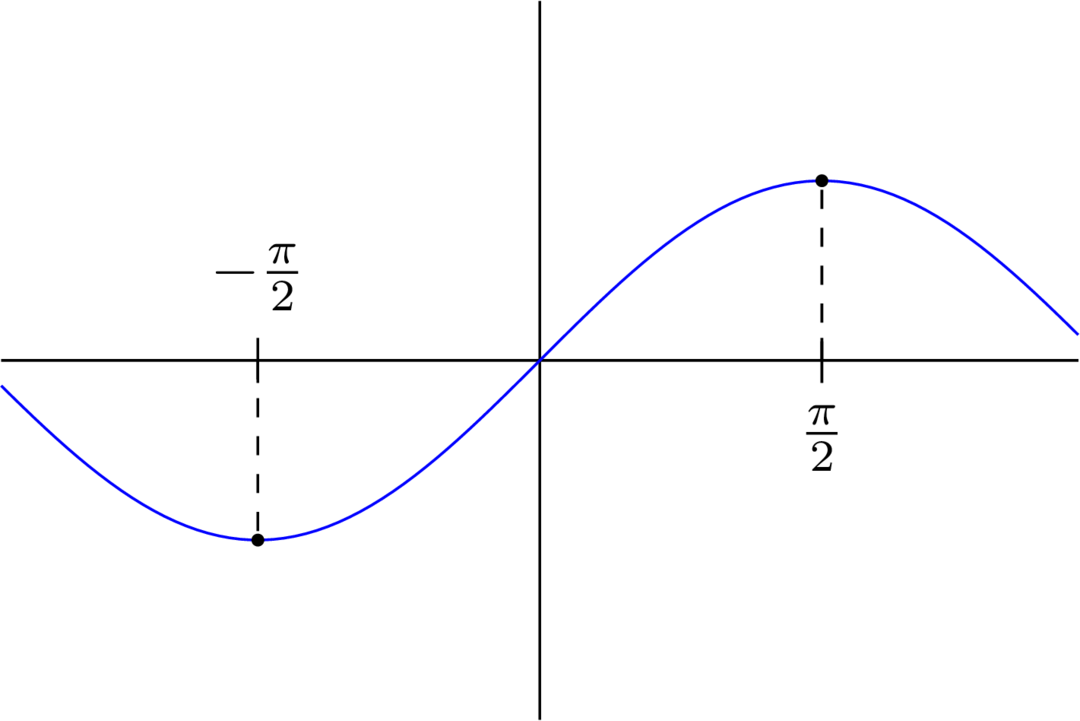
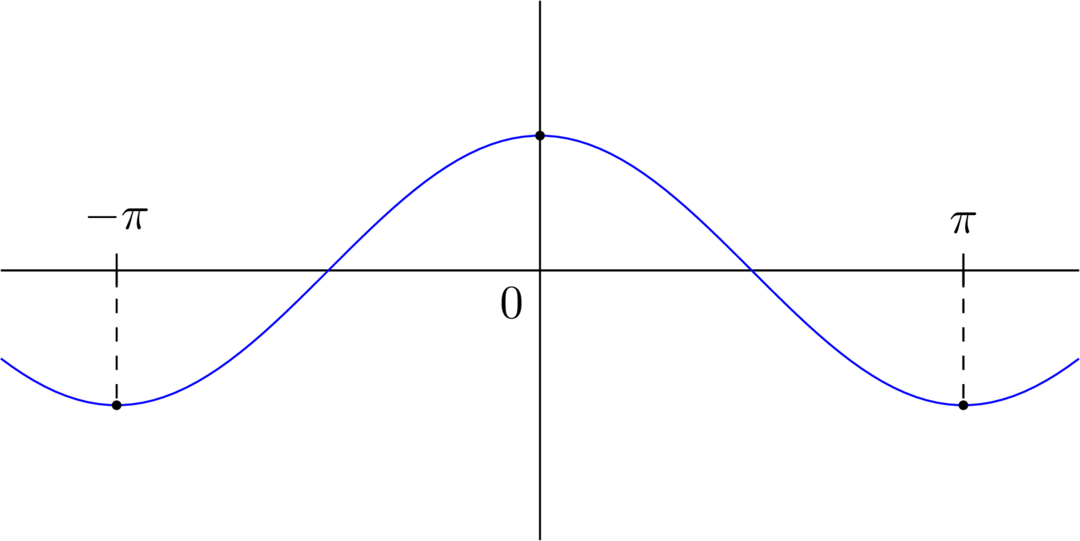
Take a look at the graph of sinx:
As you can see, [−2π,2π] does the trick. On this interval, sinx passes the horizontal line test and it hits every point in its range, [−1,1].
Now look at cosx:
There are two intervals in this case: [−π,0] and [0,π]. Hopefully, you agree that [0,π] is "nicer" than the other one since it contains only positive numbers, so we're going to restrict cosx to [0,π] when defining the inverse.
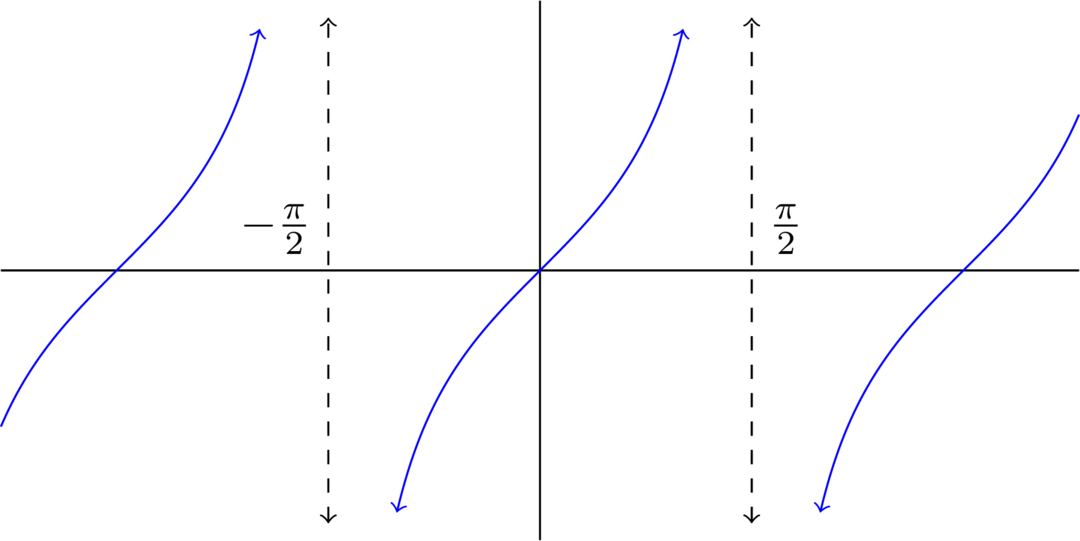
The last one we're going to look at is tanx:
As in the case with cosx, we have multiple choices, but I think it's clear that (−2π,2π) is the "nicest" interval we can use.
We can play the same game with the rest of the trig functions, and what we get are the following inverse functions:
Definition (inverse trigonometric functions)
We define the inverses of trig functions via the following tables:
We get the range of f−1(x) by swapping the domain and range of f(x).
Exercise 1.
Figure out the domains of the inverse trig functions.
One thing to notice is how I arranged the tables. If you look at the top table, the ranges are all [−2π,2π] with some points removed, i.e., the range of arcsinx with some points removed. Similarly, the bottom table ranges are all the range of arccosx with some points removed.
The way I remember how to group them are as follows: if sinx is the "main" function (e.g., cscx=sinx1), then the range is related to arcsinx. Similarly, if cosx is the "main" function, then the range will be related to arccosx.
Derivatives
Now that we have the inverses, let's talk about their derivatives:
These are all done by implicit differentiation, and I'll show one of them:
Example 4.
Prove that dxdarcsecx=∣x∣x2−11.
Solution.
To start, I'm going to set y=arcsecx. Since arcsecx and secx are inverses, we can apply secθ to both sides to get secy=x. Now we can take derivatives on both sides to get
(secytany)y′=1⟹y′=secytany1.
To finish the problem, we need to get the right-hand side in terms of x. We already know that secy=x, so we need to handle tany. We can use the following trig identity to relate tany to secy=x:
tan2y+1=sec2y=x2⟹tan2y=x2−1⟹tany=±x2−1.
We need to figure out when the sign is positive and when the sign is negative, so we need to break it into two cases:
Case 1:secy=x>0
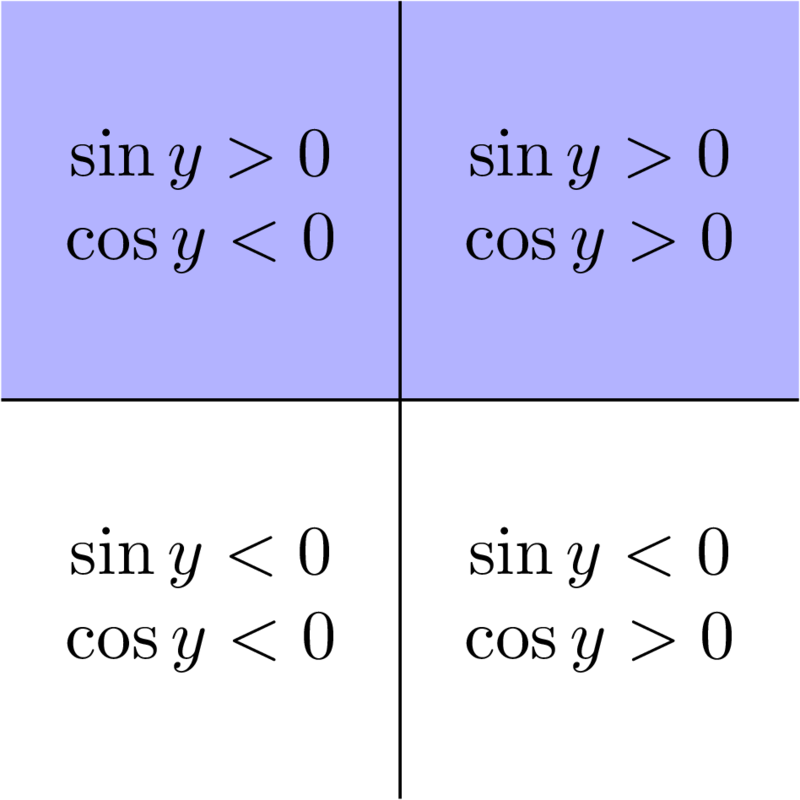
Since y=arcsecx, y is in the range of arcsecx, so y is in the first or second quadrant.
Since secy>0, this means that cosy>0, which means that y must be in Quadrant I. In this quadrant, tany>0, so tany=x2−1 in this case.
Case 2:secy=x<0
We can use the same argument: in this case, cosy<0, so y is in Quadrant II, which means that tany<0. Thus, tany=−x2−1 in this case.
Now that we have established the signs of tany, we just need to plug it back into our original function. There are two cases, so we end up with a piecewise function:
The last equality comes from the fact that ∣x∣=x if x>0 and −x if x<0.
Integration by Parts
Theorem (integration by parts)
If u and v are functions, then
∫udv=uv−∫vdu.
Given an integral, you're free to choose u and dv however you like. However, the main issue after applying the formula is the integral term ∫vdu, so before you start, try to think about what vdu looks like.
The way I remember the formula is that you pick one thing to differentiate (u) and one thing to integrate (dv). Then you integrate first to get uv and then differentiate after to get vdu.
Examples
Example 5.
Calculate ∫xsinxdx.
Solution.
For this problem, you'll want to differentiate x because it will just become 1. If you integrate xdx, then you end up with 21x2, which is more complicated. So, we'll use u=x and dv=sinxdx, which gives us
Even though there's only one term, we can still use integration by parts because cos−1x=cos−1x⋅1. Choose dv=cos−1xdx isn't going to do anything for us because we don't know how to integrate it (yet), so we need to let u=cos−1x and dv=dx instead. Then
Like the example before, we can let u=lnx and dv=dx. Then
du=xdxandv=x,
so we get
∫lnxdx=xlnx−∫x⋅x1dx=xlnx−∫dx=xlnx−x+C.
Example 8.
Calculate ∫x3lnxdx.
Solution.
I want to differentiate lnx because it gives me x1, which plays nicely with all the other terms. So, we want to choose u=lnx and dv=x31dx, which gives